GPU 和 TPU 设计理念简介
文章目录
最近看到关于 GPU 和 TPU 介绍的两篇超长优质文章[1, 2],非常建议阅读原文,本文只对其描述的设计理念做简单笔记。
1、内存墙(The memory wall)
在硬件层面,算术运算成本相对较低,而数据传输成本却很高。两者之间的差距并不小,而且还在逐年扩大。这里的成本,不止是能耗的成本,还有时间的成本。
这不是增加带宽就能解决的问题。HBM(High Bandwidth Memory,高性能DRAM) 内存速度每一代都在提升,但仍然不够快。
在内核编写时,数据分块总是首要任务。将数据分块,并且每次移动一整个数据块。在再次移动之前,尽可能多地对它进行运算。加速器上的所有优化最终都可归结为数据暂存问题。硬件本身就明确地说明了这一策略。编译器、库和内核最终都遵循着相同的规则:尽可能长时间地将数据保持在运算单元附近。
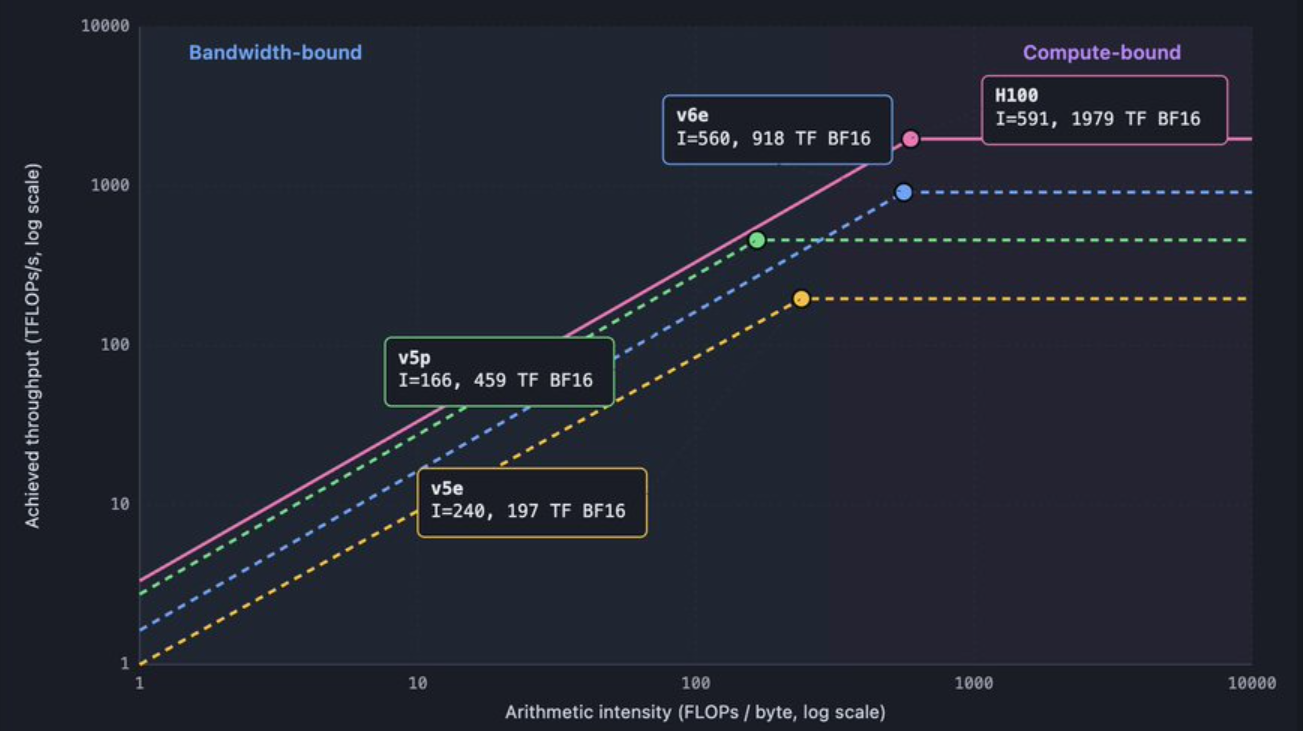
算术运算强度(arithmetic intensity) 是指每次移动一个字节所执行的浮点运算次数。即每字节浮点运算次数(FLOPs per byte)。矩阵块越大,每次移动字节所需的运算量就越多,性能越好。
突破内存瓶颈的另一个关键因素是精度。每少用一位,就意味着少一个数位的消耗。因此,近十年来,加速器(accelerators) 的位宽一直在稳步下降。现代小尺度计算技巧是微缩放(microscaling):将数值以小格式(4 位或 8 位)存储,为每组数值存储一个单独的缩放因子,然后让硬件在计算过程中将该缩放因子乘回去。存储和带宽主要取决于小格式,而精度则取决于缩放因子。
2、设计理念
现代 CPU 核心大部分用于分支预测、乱序调度、推测机制和缓存,竭力于不可预测的代码的快速执行。其设计源于以下猜想:
- 频繁的、不可预测的分支和内存访问
- 对单线程的低延迟要求极高
CPU 优化的是延迟:让单个线程运行速度快。
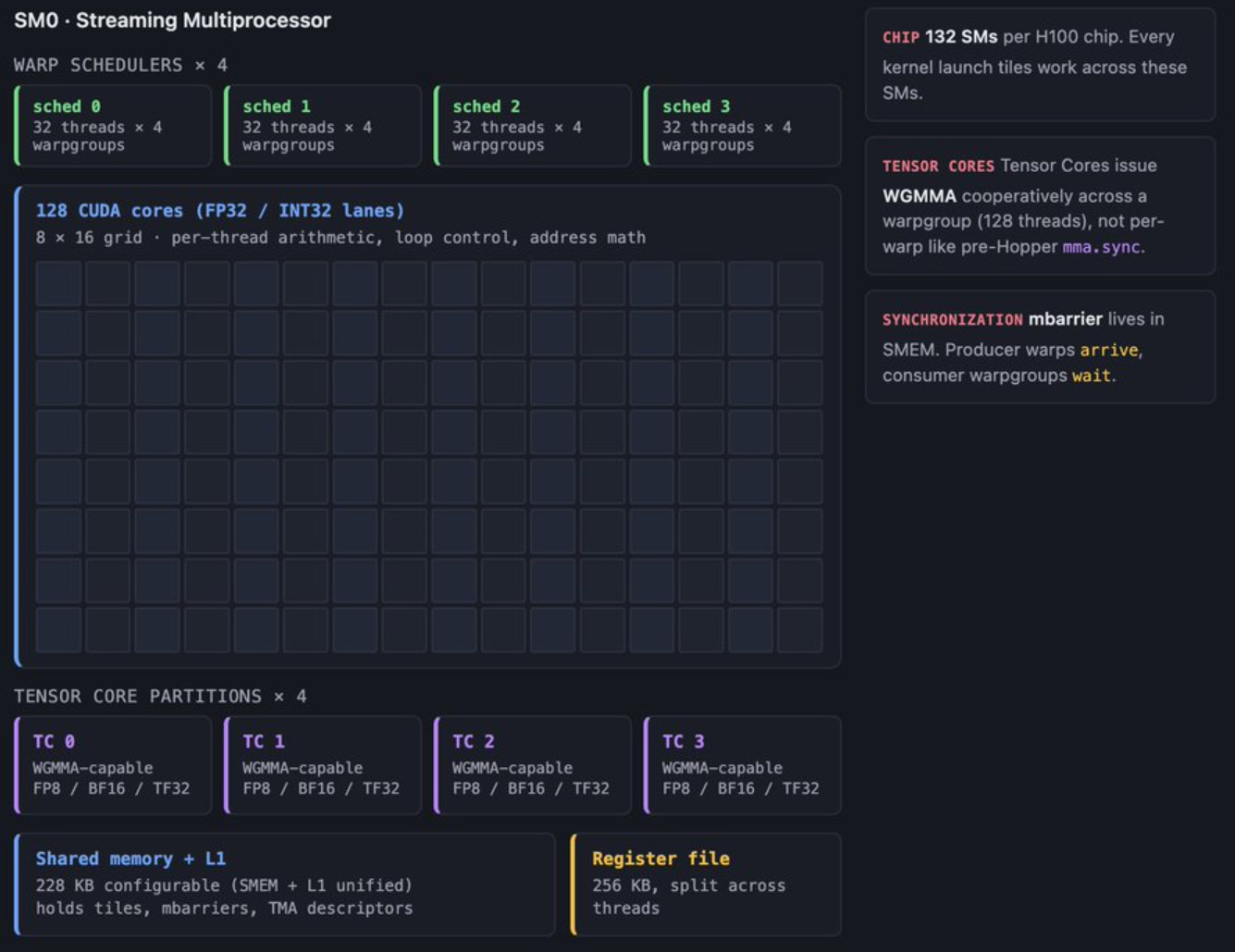
而 GPU 通过超额分配来优化吞吐量:创建足够多的线程,确保始终有任务可做。现代 NVIDIA GPU 由流式多处理器 (SM) 组成。每个 SM 都是一个执行单元。启动内核时,GPU 调度器会将线程块分配给 SM。线程块会在分配给它的 SM 上运行直至完成。如果寄存器和共享内存允许,一个 SM 可以同时处理多个线程块。
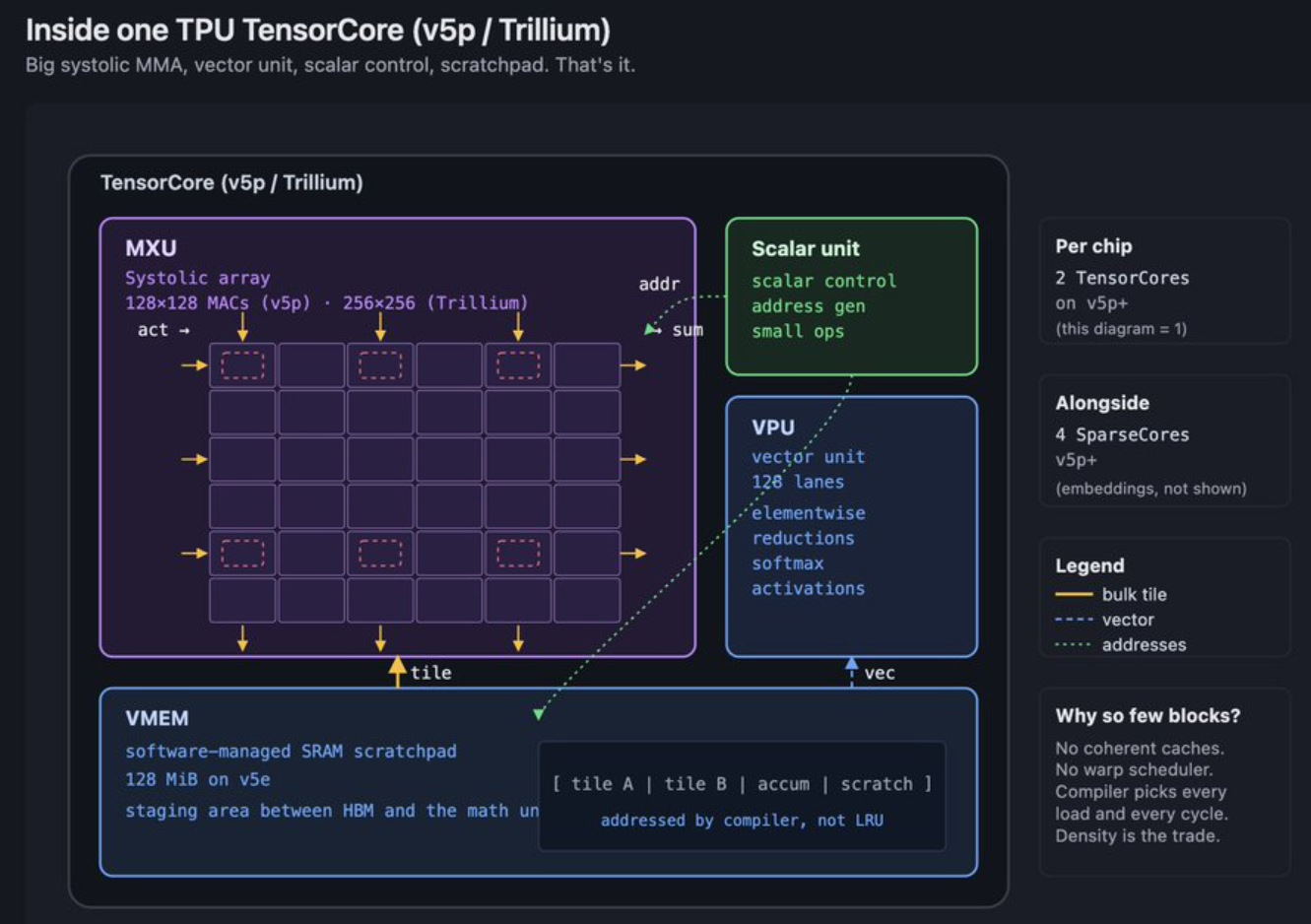
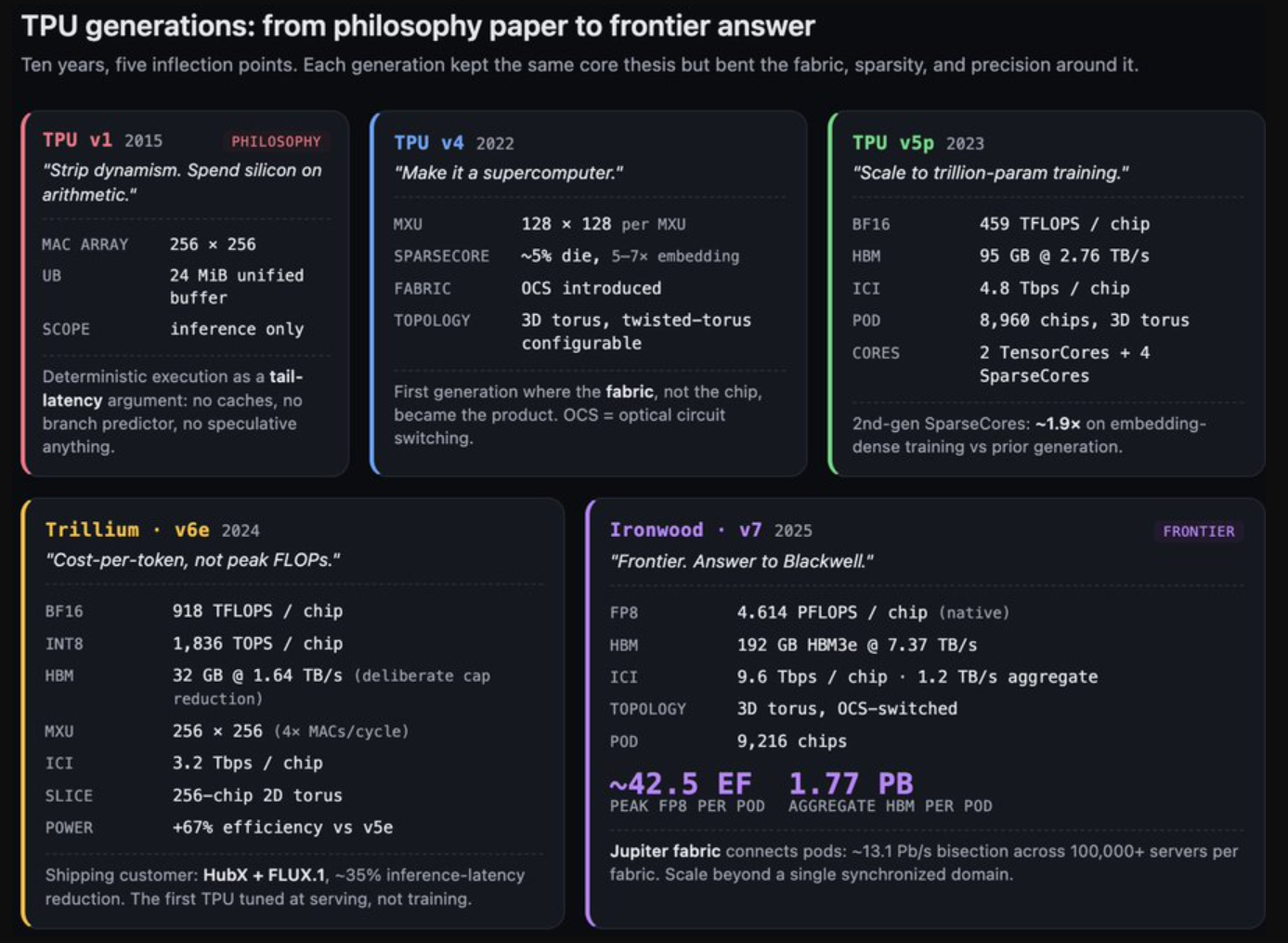
TPU 通过确定性来优化吞吐量:提前调度所有操作,并通过构建方式保持管道满负荷运转。TPU 芯片是由少量的大模块组成,MXU 是一个脉动阵列(systolic array)。它没有硬件管理的 L1 或 L2 缓存。取而代之的是,每个芯片都拥有VMEM(矢量内存),这是一个大型的软件管理 SRAM 暂存区。
2.1、三种执行模式(Three execution models)
加速器有三种执行模式,分别对应上面三种不同的硬件:
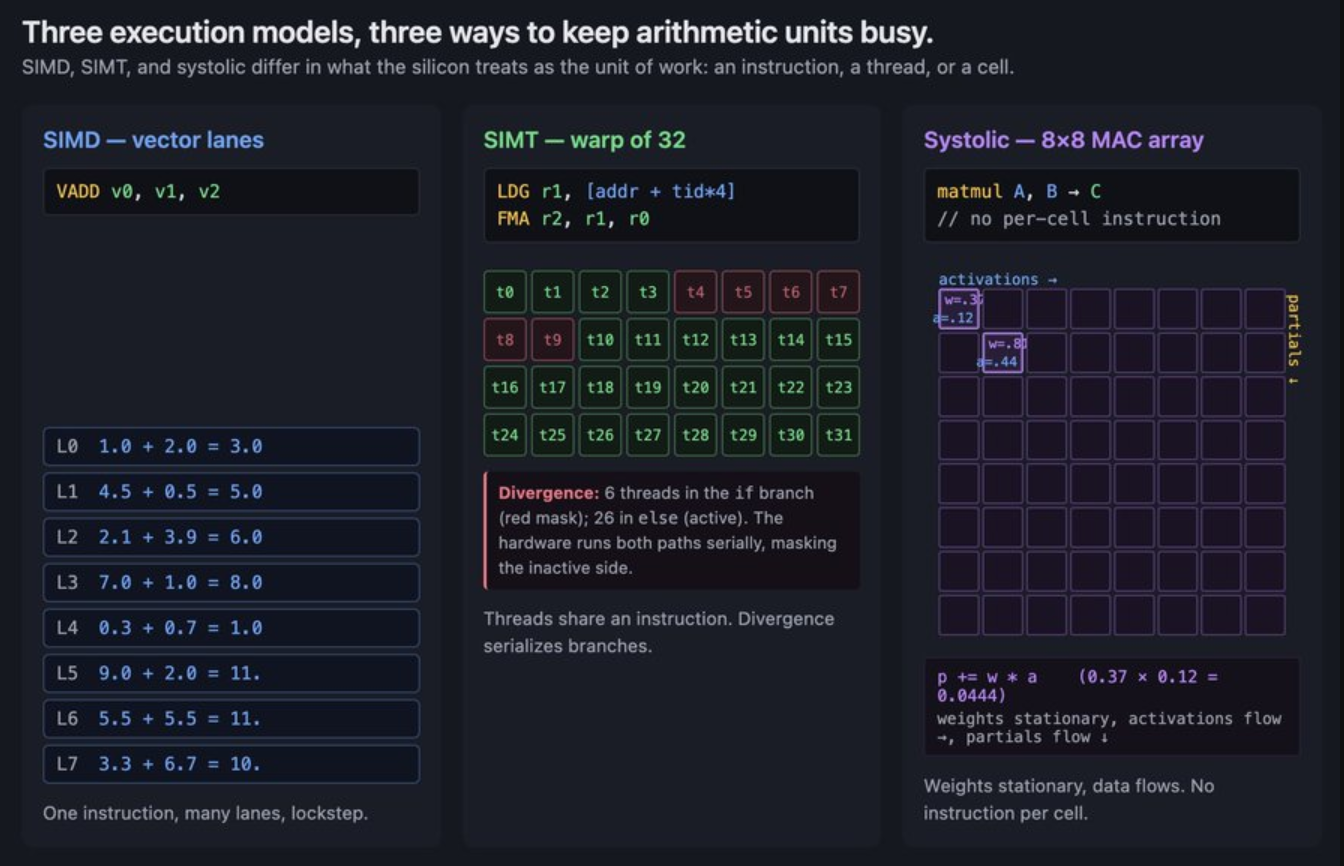
- SIMD (单指令多数据流)。它使用多个通道,每次发送一条指令,每个通道在其自身的数据上执行该指令。可以理解为向量计算。缺点是死板,不同的通道很难执行不同的操作。
- SIMT (单指令多线程)。表面上在编写拥有独立控制流的线程,但底层硬件将其分组为 32 个线程的 warp(线程束),并在底层同步运行 warp,每个线程都有自己的程序计数器、寄存器和控制流。这种“伪独立”的抽象极大地提升了开发效率和并行吞吐量,但也埋下了性能陷阱——当同一个 Warp 内的线程遇到不同的逻辑分支(如 if-else)时,就会触发分支发散(Warp Divergence),迫使硬件将原本并行的控制流转化为串行执行。
- Systolic (脉动阵列)。由密集的乘加单元(MAC)构成二维网格,彻底剥离了单个计算单元的指令读取(Instruction Fetch)和控制逻辑,让数据和权重如流水般在相邻 MAC 间按固定时钟周期接力传递并完成累加。这种“去控制化”的设计使得芯片能在极小的面积内塞入成千上万个 MAC 单元(如 256×256 阵列),但也注定它只能死板地服务于标准形状的矩阵乘法(Matmul)—— 一旦遇到不规则的运算,就需要依赖旁侧的向量或标量单元,且必须在数据分块形状(Tile Shapes)上极尽考量,否则就会因为过度填充(Padding)或填充不足而白白浪费宝贵的网格算力与时钟周期。
2.2、两种哲学(The two philosophies)
NVIDIA 的 GPU 是一台 SIMT 机器,由数千个可编程线程组成,这些线程被分组为线程束 (warp),其内存层次结构会 “奖励你保持数据在内存中的稳定,并惩罚你随意管理数据的行为”。而谷歌的 TPU 是一台脉动式机器,每个核心都围绕一个巨大的矩阵乘法单元构建,由一个名为 VMEM 的小型片上内存提供支持,并由编译器负责布局和调度。
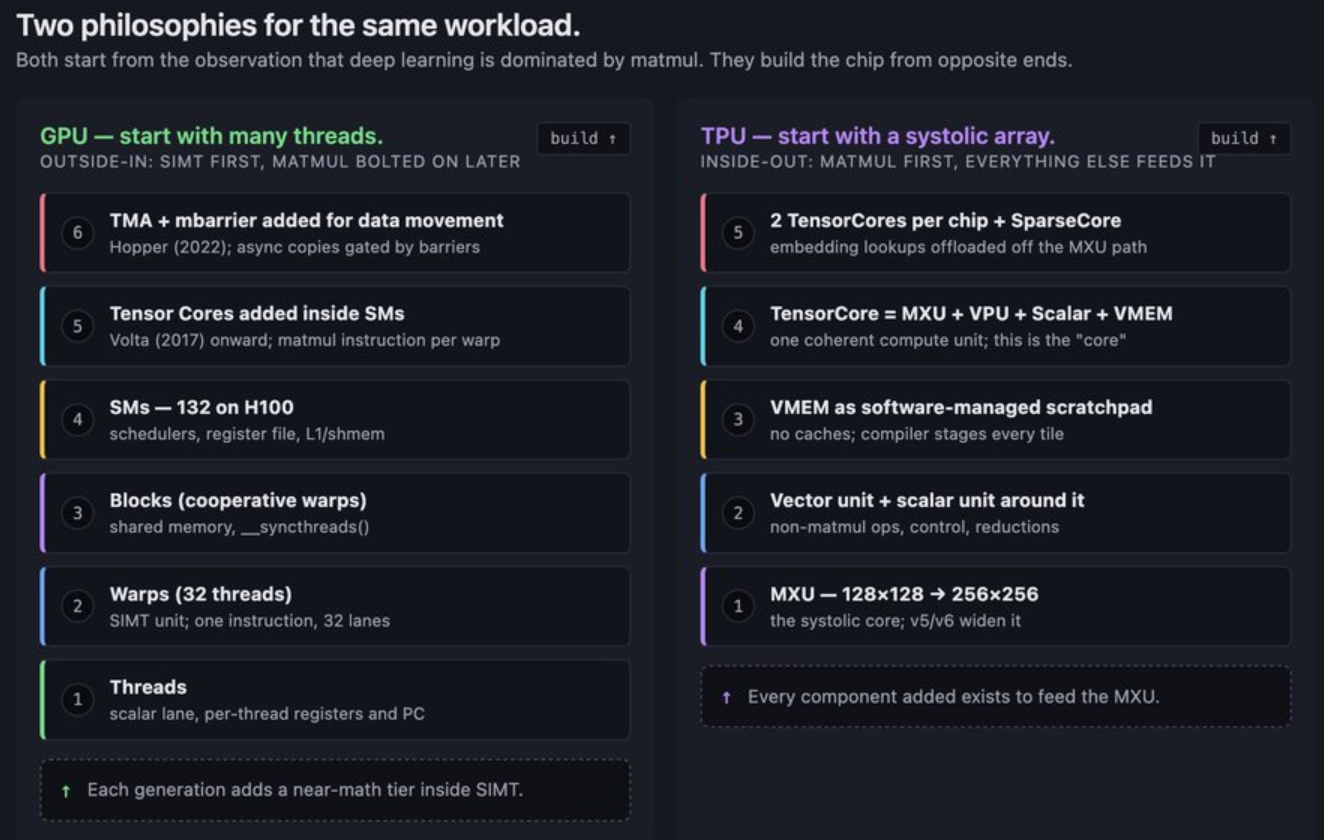
NVIDIA 的理念是:从大量并行线程入手,围绕这些线程构建内存层次结构,在每个流式多处理器内部添加矩阵引擎,以便线程可以协同执行矩阵指令。随着时间的推移,逐步添加各种功能,使线程能够更紧密地协作(例如线程束、线程块集群、分布式共享内存)。线程是先行者,其他一切都围绕着它们展开。
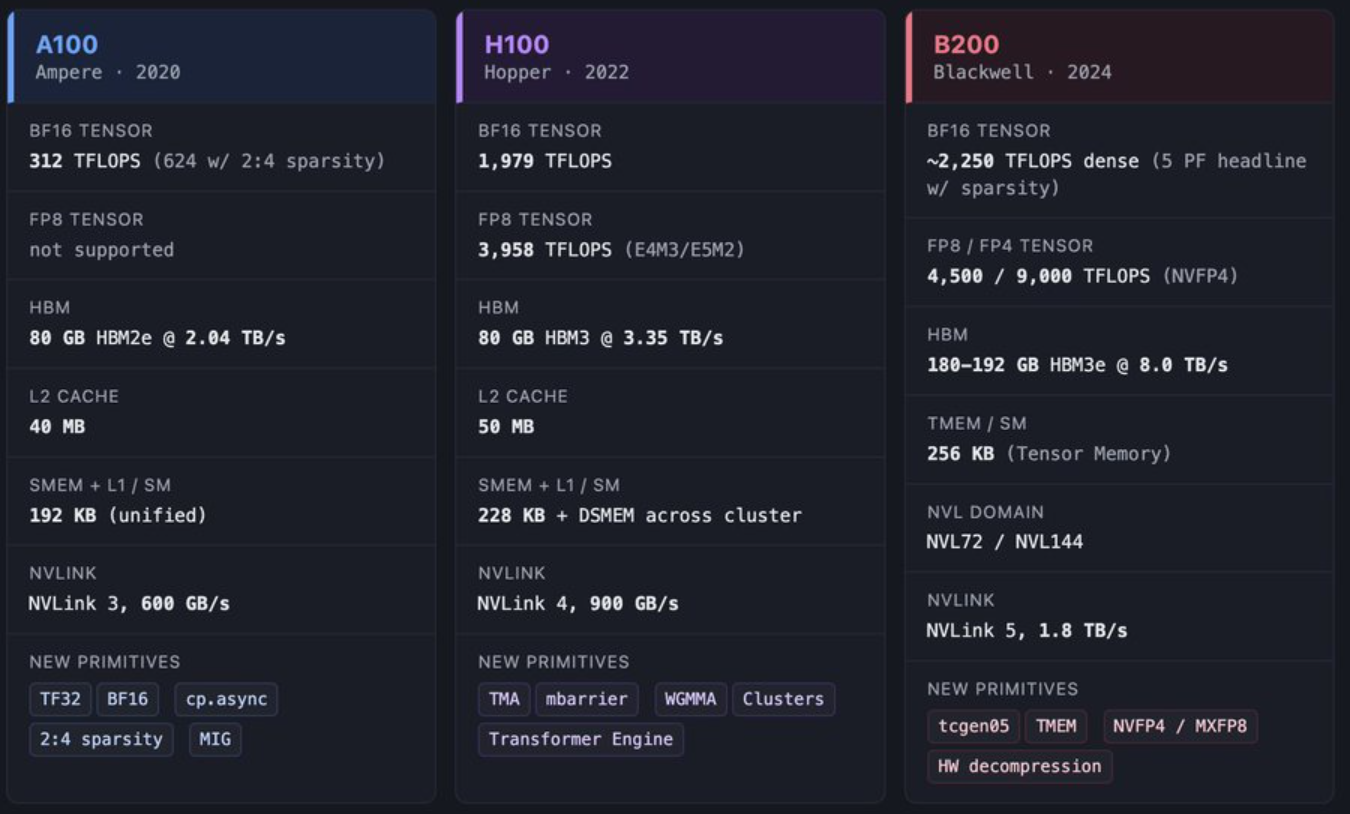
谷歌的理念,反过来理解:从矩阵数据流入手。将 MXU 置于芯片中心。添加一个向量单元来处理 MXU 无法处理的数据。添加一个标量单元用于控制。添加 VMEM,以便编译器(特指像 XLA、Triton 这样针对特定 AI 加速器的编译器)能够以 MXU 可处理的形式暂存数据。添加 ICI,以便芯片无需经过 HBM 即可交换数据块。脉动阵列是先于其他组件存在的。其他一切都围绕它展开。
这些不仅仅是组织架构上的差异,它们还会相互叠加。NVIDIA 一旦决定采用 SIMT,后续的每一个设计决策都必须以提升线程效率为目标。随着抽象技术的成熟,GPU 的编程难度会降低。随着编译器的成熟,TPU 的吞吐量密度会提高。GPU 的下限(编写简单代码所能达到的性能)很高,因为运行时环境会为你完成很多工作。TPU 的上限(编写编译器感知代码所能达到的性能)很高,因为运行时环境的动态性无需额外开销。这两种理念本身并无优劣之分,它们各自追求的是不同的性能表现形式。
参考
文章作者 calssion
上次更新 2026-04-20